rosnode ping hello_world_node rosnode: node is [/hello_world_node] pinging /hello_world_node with a timeout of 3.0s xmlrpc reply from http://raspberrypi:60715/ time=1.881838ms xmlrpc reply from http://raspberrypi:60715/ time=2.676964ms xmlrpc reply from http://raspberrypi:60715/ time=2.720833ms xmlrpc reply from http://raspberrypi:60715/ time=2.691984ms ping average: 2.492905ms
<!-- The export tag contains other, unspecified, tags --> <export> <!-- Other tools can request additional information be placed here --> </export> </package>
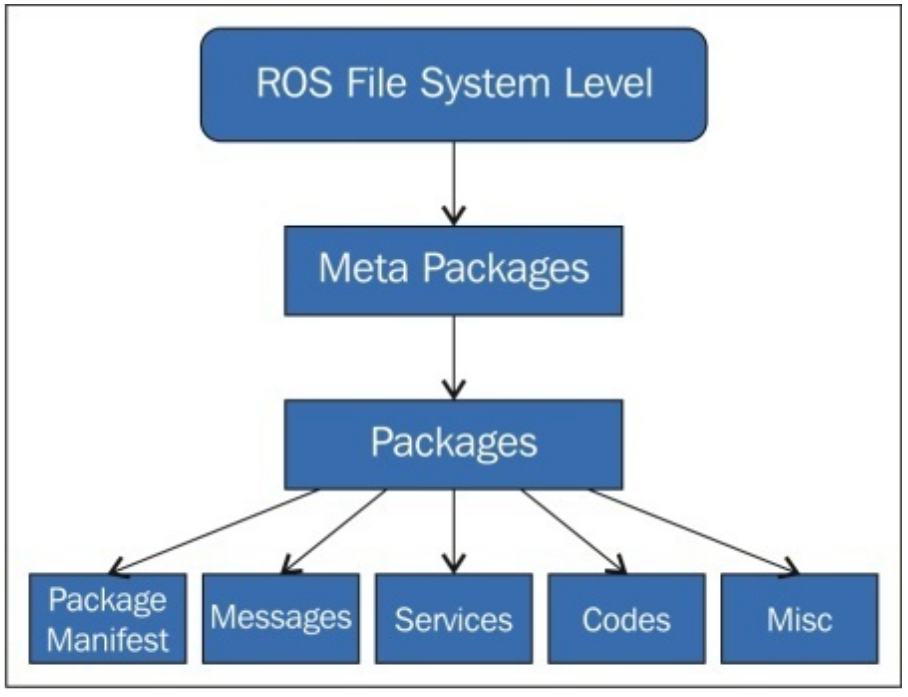
ROS meta packages
Meta packages 和其他的package 不一样它只有一个package.xml文件.它不包含其他目录和文件,它只是将多个包组织成一个逻辑意义上的包。 在package.xml 文件中没有依赖节点只有 来包含组织在meta 包中的包。
ROS messages
ROS 节点可以发布特定类型的数据,消息的数据类型定义在ROS package的msg包里面,以.msg为扩展名的文件里面 消息类型的定义和我们定义一个变量形式上很类型,下面是一些例子: int32 number string name float32 speed 在上面的例子中第一部分称为“field type” 第二部分称为“field name” 用于从消息中获取数据,通过上面的定义我们可以使用msg.number来获取number消息的值
ERROR: ROS_MASTER_URI is not defined (Bad Environment) [FATAL] [1392021564.231775029]: ROS_MASTER_URI is not defined in the environment. Either type the following or (preferrably) add this to your ~/.bashrc file in order set up your local machine as a ROS master: export ROS_MASTER_URI=http://localhost:11311 then, type ‘roscore’ in another shell to actually launch the master program.
@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ @ WARNING: REMOTE HOST IDENTIFICATION HAS CHANGED! @ @@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ IT IS POSSIBLE THAT SOMEONE IS DOING SOMETHING NASTY! Someone could be eavesdropping on you right now (man-in-the-middle attack)! It is also possible that a host key has just been changed. The fingerprint for the ECDSA key sent by the remote host is ……………………………………………. Please contact your system administrator. ……………………………………………. remove with: ssh-keygen -f “/home/jimmy/.ssh/known_hosts” -R 192.168.1.102 ECDSA host key for ………… has changed and you have requested strict checking. Host key verification failed.
初看一下是不是被吓到了,其实很简单运行如下命令重新登入就可以了:
rm -rf ~/.ssh/known_hosts
再次输入ssh pi@[步骤3 查到的IP地址] 你就可以看到:
Are you sure you want to continue connecting (yes/no)?